Was a philosophy PhD student, left to work at AI Impacts, then Center on Long-Term Risk, then OpenAI. Quit OpenAI due to losing confidence that it would behave responsibly around the time of AGI. Now executive director of the AI Futures Project. I subscribe to Crocker’s Rules and am especially interested to hear unsolicited constructive criticism. http://sl4.org/crocker.html
Some of my favorite memes:
(by Rob Wiblin)
(xkcd)
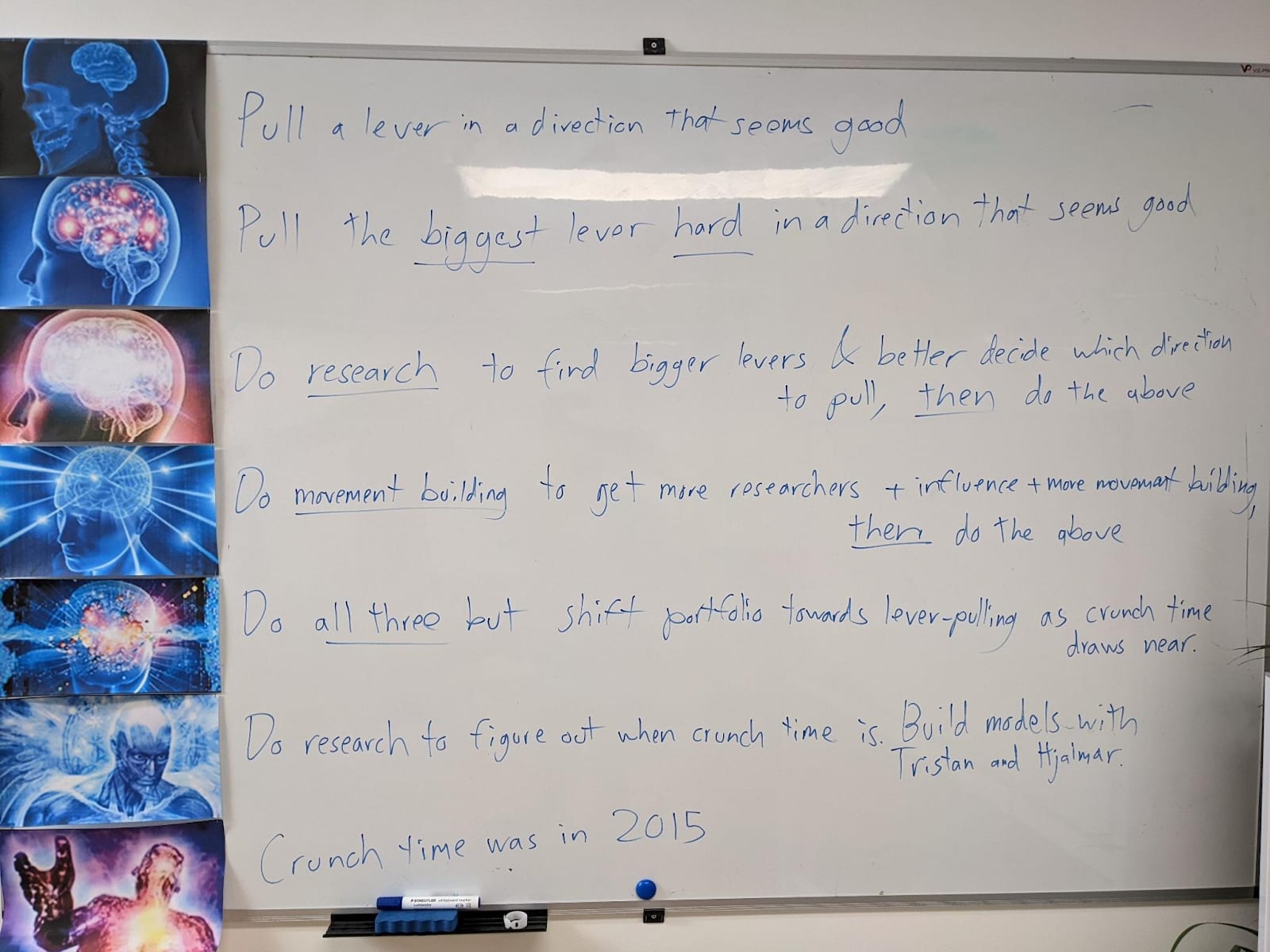
My EA Journey, depicted on the whiteboard at CLR:
(h/t Scott Alexander)
Thanks!
Religion dying… even in the leadership of the country? or just in the common folk? I ask because it seems relevant to the question of whether Iran having a nuke would be super dangerous for Israel. Naively it seems like Iran might do a nuclear first strike on Israel if their leadership really believes in the martyrdom stuff etc., but if instead it’s just empty words and their core motivation is simply to make their country strong, they wouldn’t use nukes except in self defense against imminent doom or nukes being used against them.